koniです。
前々回の自己紹介の記事で「ちょっとしたロボットを動かそうとしています」とご紹介しました。この前の休日に発注した回路が届いたので、はんだ付けしてモータを回してみました。他に面白そうなブログネタがなかったので、今回はDCモータの回し方について書いてみます。
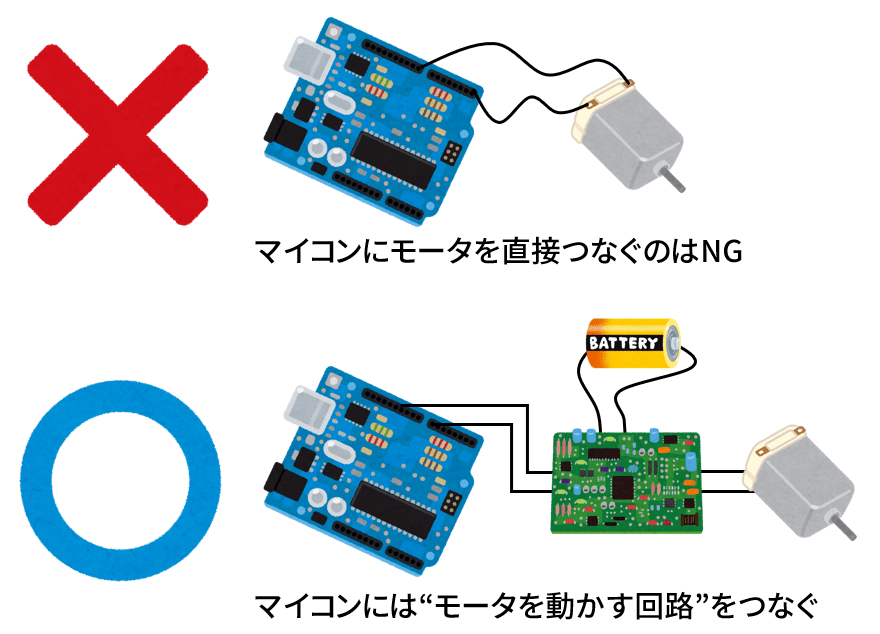
小学校の理科の教科書でご覧になった方も多いと思いますが、モータに電池を直接つなげばモータは回転します。それでは今回はマイコンで回転させたいのでマイコンにモータを直接つなげばよいのかというと次のような理由でNGです。
- 単にマイコンに繋いだだけでは逆回転(電池につなぐ場合は、電池を逆にすればモータも逆に回る)ができない
- マイコンに流してよい電流は数mA程度で、モータに流す電流としては足りない
- 今回の場合、マイコンは3.3Vで動くのに対してモータには9V必要なので、電圧も足りない
ではどうするのかというと、次の図のようにモータを動かすための回路にマイコンとモータをつなぎます。この回路のことをそのままの名前ですがモータドライバと言います。

ではこのモータドライバは一体どんな回路で、どうやってモータを動かすのかというのがさらに次の図です。
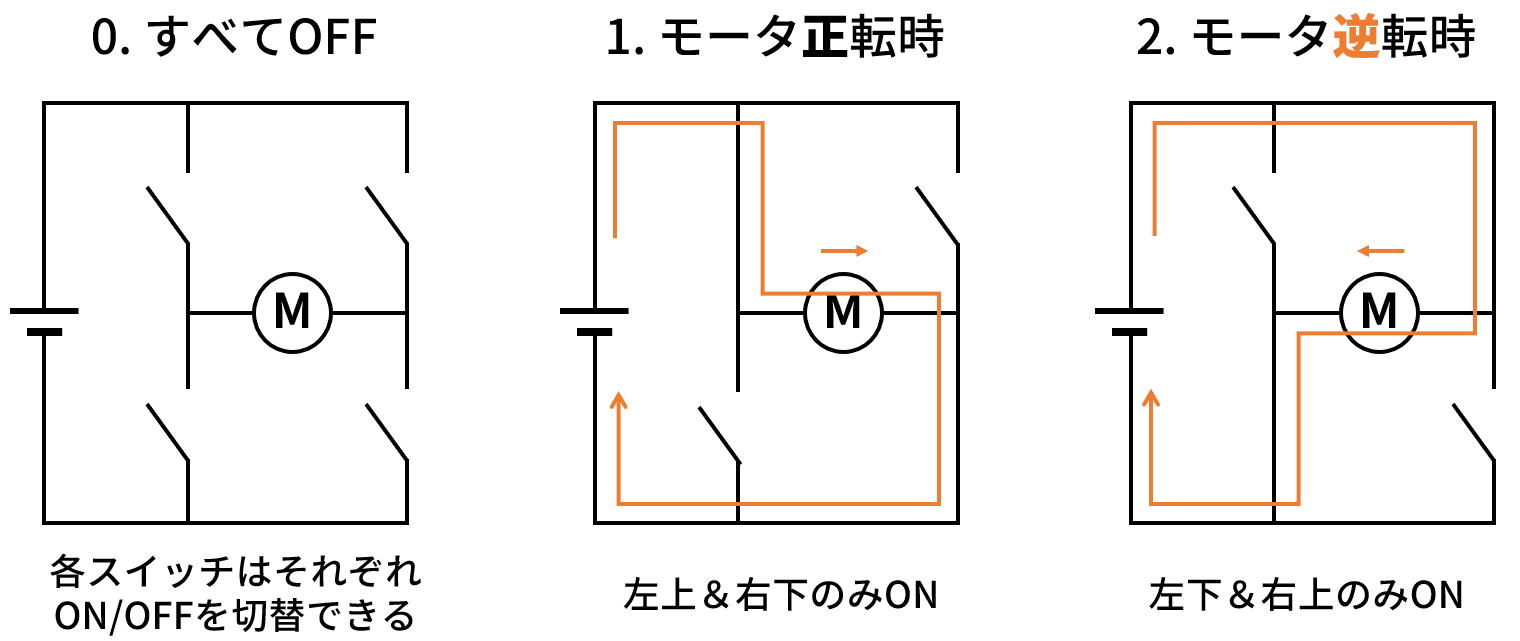
このスイッチ4つと真ん中にモータ(Mマーク)があるこの回路は、Hブリッジと呼ばれる有名なモータドライバの回路です。この回路は、
- 左上と右下のスイッチがONで、左下と右上のスイッチがOFFのとき
- モータには左から右に電流が流れます
- 左上と右下のスイッチがOFFで、左下と右上のスイッチがONのとき
- モータには右から左に電流が流れます
こうすることで、スイッチのON/OFFをマイコンから操作することで、モータの正転・逆転を切り替えることができます。
ちなみに、このスイッチは実際にはMOSFETというトランジスタの一種で、マイコンの信号(0V or 3.3V)でON/OFFを切り替えることができます。あくまでスイッチのON/OFFなので、モータに流れる電流がマイコンを通ることはありません。
このモータを動かすモータドライバ、実際にどんな回路なのかというとこんな見た目です。
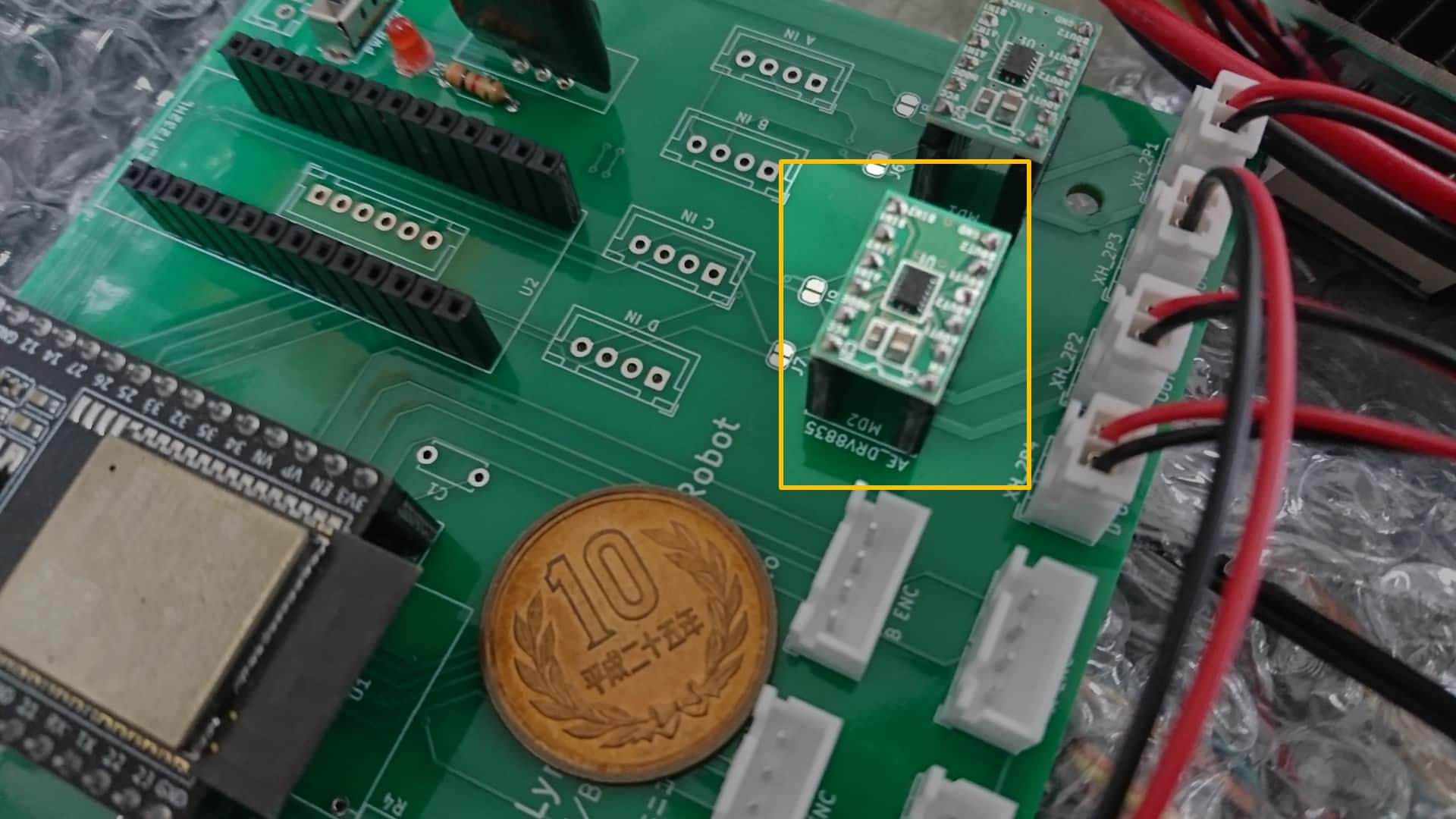
大きさの比較のため10円玉を置いていますが、黄色い枠の部分がモータドライバICです。上でモータドライバの仕組みについて紹介しましたが、それを自分で作るわけでなく既製品を使いました。緑色の基板はあくまでICチップを乗せるアダプタのような役割のため、より正確には小さい黒いICがモータドライバです。この小さいチップの中にHブリッジ回路が入っています。
ちなみにHブリッジを使ったモータドライバ回路を自分で設計して作成することもありますが、今回は私の回路知識と作業時間、モチベーションなどの都合で既製品を使う方法にしました。
さて、それではメイン基板ができたのでこれで完成、と思いきやまだ電源回路を用意していませんでした。実際に動かすにはバッテリーの電圧を調整してモータドライバにつないであげなくてはなりません。相変わらずWebシステムの会社とは思えない内容で恐縮ですが、次回に続きます。